此外,加速度计在节能方面也有着不俗的表现。对于长时间未动的健身追踪器等设备,加速度计能够检测到这种静态状态,进而触发设备的自动关机功能,从而显著延长电池寿命。
磁力计:定位磁北的得力助手
磁力计是一种能够测量磁场强度和方向的传感器。它常被应用于电子指南针中,通过分析检测到的磁场信息来确定磁北的方向。然而,磁力计作为独立传感器使用时,往往难以准确识别磁北。这是因为磁力计需要精确的校准和稳定的环境来确保测量结果的准确性。在手持设备中,磁力计通常与加速度计配合使用,以提高定位精度。加速度计能够检测设备的倾斜角度,从而为磁力计提供必要的补充信息,使其能够更准确地确定磁北方向。
陀螺仪:弥补加速度计的盲点
虽然加速度计能够感知到设备的静态状态,但当设备以加速度计为旋转中心进行旋转时,加速度计却无法检测到这种运动。这正是加速度计的盲点所在。而陀螺仪则能够弥补这一不足,它能够检测到设备的旋转运动,为系统提供更为全面的运动信息。
然而,陀螺仪的引入也带来了一系列挑战。在三种类型的传感器中,陀螺仪往往是体积最大、成本最高的。尽管它提供了宝贵的数据,但其高昂的价格、较大的体积以及较高的功耗往往使得开发者在权衡利弊时犹豫不决。因此,在许多应用中,开发者不得不将位置和方向功能限制在由加速度计和磁力计提供的6轴数据范围内。
综上所述,加速度计、磁力计和陀螺仪各自具有独特的功能和优势,它们共同构成了现代消费类电子设备的核心感知系统。随着技术的不断进步和成本的降低,我们有理由相信,未来的设备将能够更加精准地感知运动和方向,为用户带来更为丰富和便捷的体验。
如今,软件算法和低噪声,低延迟传感器的进步使得仅使用加速度计和磁力计的数据来模拟陀螺仪输出成为可能。这是中使用的方法,其中系统根据对设备先前位置的了解来计算设备的旋转方向和速度。换句话说,当系统可以随时间跟踪方向时,它可以推断旋转数据。
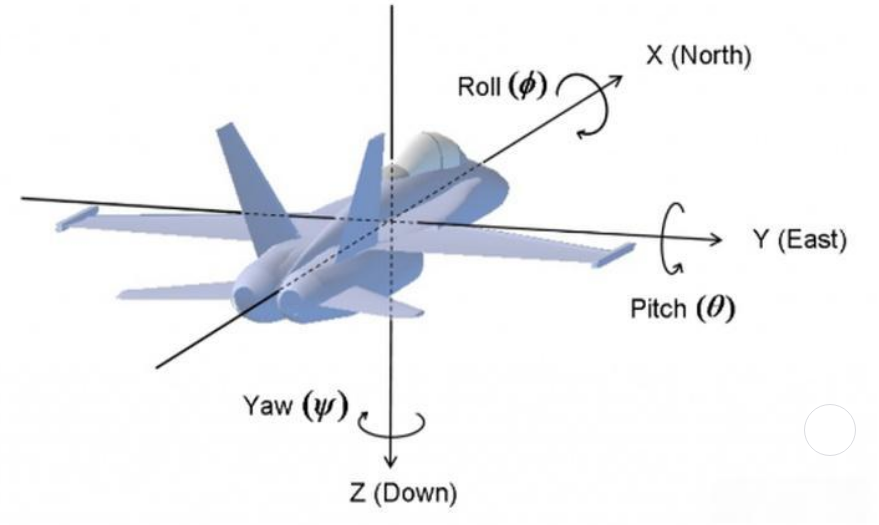
应用:无人机、直升机和飞机
IMU传感器的另一个应用是跟踪无人机、直升机和飞机的方向和航向。
通常,这些解决方案使用IMU传感器和电子罗盘(即磁力计)的组合。这种组合有AHRS传感器的技术名称。(姿态和航向参考系统)。
基本上加速度计的角度告诉我们无人驾驶飞机在地面,陀螺仪使用此数据作为参考和计算,偏航和滚动不断无人机飞行约和磁强计告诉我们的方向无人机是领导对我们地球的磁场,这样我们就能在地图上找到它!
IMU和MARG传感器有什么区别?MARG代表磁力计、角速度和重力,基本上是指IMU和指南针(磁力计)的组合。如本应用中所讨论的,这些主要用于飞机。